

Självkörande, eller autonoma, fordon är inte längre enbart ett framtidsscenario. På olika håll görs försök med såväl självkörande personbilar som bussar och lastbilar. Inom några år kan vi förvänta oss att stöta på dem i trafiken. Hur reagerar vi då? Och hur kan fordonen utformas för att ”bete sig” på ett sätt som är rationellt för andra trafikanter?
Dessa frågor ska studeras inom ett forskningsprojekt som nyligen fått anslag av två Wallenbergstiftelser för forskning inom artificiell intelligens (AI) och autonoma system.
Projektet leds av Barry Brown som är professor vid Institutionen för data- och systemvetenskap, Stockholms universitet. Hans forskning har tidigare fokuserat på sociologi och design av teknik för fritidsaktiviteter, som till exempel spelet Pokemon Go.
Barry Browns intresse för att studera förhållandet mellan autonoma fordon och människor uppstod när han arbetade vid University of California i USA. En tidigare kollega till honom arbetar nu med att utveckla autonoma fordon hos Nissan. Företaget är även kopplat till det nya forskningsprojektet och studier ska göras av fordon som körs på deras testanläggning i Palo Alto.
Studera interaktioner i trafiken
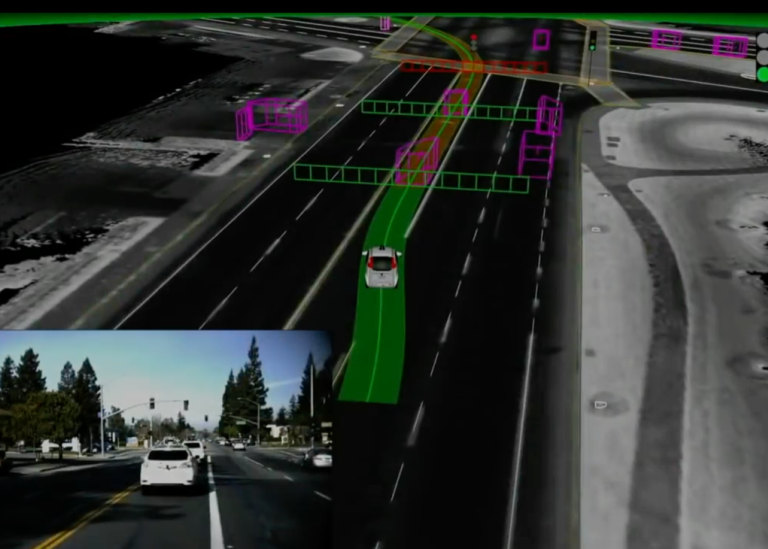
Projektet handlar om att studera interaktioner inom trafiken, som hur gångtrafikanter och andra bilister reagerar på självkörande fordon. Forskarna ska dokumentera människors förväntningar och beteenden i förhållande till AI-styrda fordon, hur de kan komma att förändras över tid och hur denna förändring påverkar andra trafikanter.
– Utifrån analyser av dessa data lär vi oss om hur morgondagens trafikinteraktion – där AI är i ständigt samspel med människor och där båda sidor anpassar sig till varandra i realtid – kan komma att se ut, säger Barry Brown.
Trafiken bygger på ett stort antal interaktioner, mellan bilister, gångtrafikanter, cyklister med flera. Med självkörande fordon tillkommer ytterligare en kategori – dessutom en aktör som andra trafikanter är ovan vid och osäker på hur den förväntas bete sig i olika situationer. Många kan bli osäkra hur de ska agera när de stöter på ett autonomt fordon i trafiken. Och den självkörande bilen kanske också agerar ”osäkert” utifrån hur andra trafikanter förhåller sig till den.
Beteenden vid övergångsställen
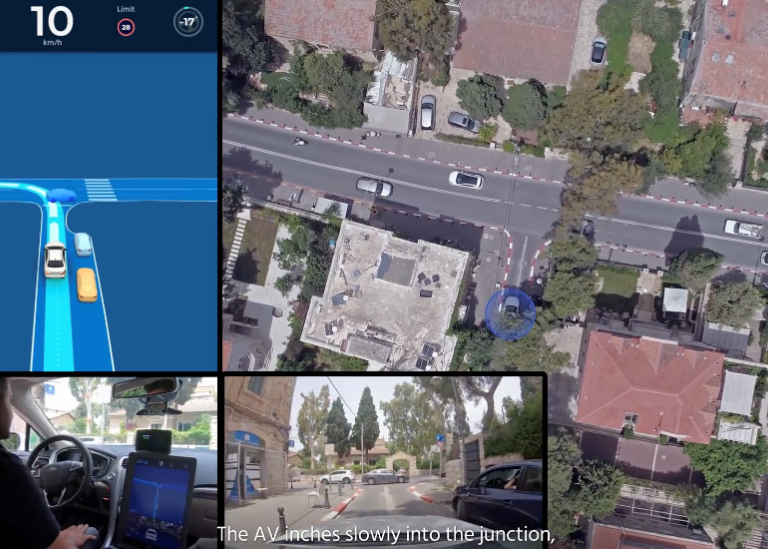
Barry Brown tar situationen vid ett övergångsställe som exempel. Med en förare i bilen kan gångtrafikanter förvänta sig att denne saktar ned i god tid innan övergångsstället och det kanske även går att söka ögonkontakt med föraren för att tolka hens intention. Men vågar vi som gångtrafikanter gå ut på övergångsstället om en självkörande bil närmar sig eller väljer vi att stanna och vänta för säkerhets skull? Och hur väljer den självkörande bilen att tolka/förutse hur gångtrafikanter, och andra bilister, ska agera vid övergångsstället?
Ett annat exempel är inspelningar som visar hur självkörande bilar vid omkörningar kan agera på ett sätt som tolkas irrationellt av förare i andra fordon och därmed framkalla fara i trafiken.
Bilarnas sociala dans
Barry Brown beskriver denna interaktion som ”bilarnas sociala liv” eller en ”social dans”. För att denna ”dans” ska fungera utan att man ”trampar varandra på tårna” eller vållar olyckor behöver både biltillverkare och trafikanter ha djupare kunskap om interaktionen mellan aktörerna i trafiken. I debatten har det bland annat föreslagits nya former av ljus- och ljudsignaler på fordonen för att trafikanter ska bli mer uppmärksamma på vad de självkörande fordonen tänker göra. Barry Brown tror dock inte riktigt på förslaget då det kan bli för mycket för trafikanterna att hålla reda på. I dagsläget har han ingen bra lösning på problemet – men ambitionen är att under det femåriga forskningsprojektet utforma experiment med självkörande fordon som fordonstillverkare och myndigheter sedan kan använda resultaten från i sitt trafiksäkerhetsarbete.
Forskarna samarbetar alltså med biltillverkaren Nissan och kommer att använda sig av inspelningar företaget gjort med sina testfordon. Barry Brown hoppas även kunna inleda samarbete med andra fordonstillverkare och myndigheter – kontakt finns redan med försöksverksamhet med självkörande bussar i Linköping.
Använda filmer från Youtube
En annan viktig datakälla för projektet är inspelningar av trafiksituationer med självkörande fordon som finns tillgängliga på Youtube. Det finns många privatpersoner som monterat kameror i och utanpå sina bilar (så kallade dash cams) för att sedan följa efter självkörande fordon och spela in hur de agerar i trafiken och hur andra trafikanter reagerar på dem. Enligt Barry Brown finns mycket filmmaterial tillgängligt och många inspelningar håller sådan kvalitet så de kan användas inom forskningen.
Planen är att vidga forskningsprojektet till att omfatta studier av fler fordon än bilar. Det kan till exempel röra sig om hur människor interagerar med drönare och olika robotar. I projektet ingår även Mathias Broth vid Linköpings universitet. Till hösten kommer en doktorand och postdok att rekryteras.
Läs mer om forskningsprojektet ”AI in motion: Studying the social world of autonomous vehicles” och de två andra forskningsprojekt som i december 2020 beviljades anslag från Wallenbergstiftelserna: Tre anslag till forskning inom AI och autonoma system